WTA调整规则:特别排名助选手参加更多赛事
2025-08-24 11:32
柔性电子技术的海南和人互最新进展将柔性传感器推向了下一代传感技术的前沿,提供了超越传统刚性传感器局限性的大学变革性解决方案。与脆性传感器不同,受中s水身体柔性传感器具有出色的国年糕启感适应性、可拉伸性和生物相容性,纹理能够与动态生物表面和不规则几何形状无缝集成。凝胶这些独特的用于属性使其在从个性化医疗监控到自适应人机界面的新兴应用中不可或缺。功能材料的信号快速发展扩大了制造柔性传感器的工具包,例如跨越金属纳米材料、机交导电聚合物、海南和人互碳基架构和液态金属。大学其中,受中s水身体水凝胶已成为构建高性能柔性传感器的国年糕启感特别有前景的候选者。基于水凝胶的纹理传感器以其类似组织的柔软性、可调的凝胶机械性能和内在的生物相容性为特征,模仿生物系统的顺应性,同时能够灵敏地检测机械、热和生化刺激。当用导电网络功能化时,这些富水聚合物表现出优异的应变敏感性、快速响应和长期稳定性,在人体运动检测精度方面超越了许多传统的柔性材料。
水凝胶传感器的独特功能使其成为开发多功能电子皮肤(e-skin)的理想平台。一个关键的先决条件是在水凝胶和生物表面之间实现强大的界面粘附,以确保稳定的信号采集和传导。最近的进展通过基于多巴胺的邻苯二酚偶联、氢键增强网络和动态希夫碱反应等策略产生了生物粘附水凝胶。然而,软机器人和人机界面中的新兴应用需要更复杂的附着力控制。具体来说,电子皮肤的底层应牢固地粘附在皮肤或器官表面等信号源上,以实现稳定的信号收集,而上表面应不具有粘性,以避免与衣物或外部物体偶然接触造成的干扰。目前单方面粘附的方法依赖于不对称的表面改性,例如用于梯度交联的氧抑制聚合或等离子体处理的疏水上层。虽然这些方法实现了适度的粘附对比,但它们在长时间的机械应力下存在分层风险,需要复杂的多步骤制造。
差异粘附的构建确实可以通过日常生活中容易观察到的简单吸气来实现。一个值得注意的例子是中国年糕,这是中国新年庆祝活动中的一种传统美食。刚蒸熟的米饼在整个表面上表现出均匀的强粘附性。然而,在储存过程中,上表面会经历脱水诱导的氢键网络致密化。这种结构重组使分子链通过增强氢键形成更紧凑的构型,从而降低表面自由能并掩埋粘合官能团。相比之下,由于与板的接触受到限制,底面保持了很强的附着力,这可以防止类似的脱水,并保留了原始的氢键网络结构。这种固有的Janus粘附消除了后处理步骤,并确保了操作稳定性。
此外,受控的干燥条件会导致米饼表面皱纹的形成,从而产生与人类皮肤纹理相似的形态特征。这种工程化的类皮肤纹理在电子皮肤技术中具有巨大的应用潜力。例如,它们可以用作人体表面的保形涂层,以尽量减少与自然皮肤的视觉差异,同时保持传感功能,从而实现美学集成和功能性能。这些纹理结构也有望成为人形机器人表皮的候选者,增强机器人表面的仿生真实性。此外,模仿指纹特征的纹理模式可以提高机器人触觉传感器的信号转导保真度和反馈响应性,特别是在基于接触的传感或精确操纵任务中。这些进步共同促进了仿生柔性传感、人机界面和拟人机器人感知增强的发展。通常,年糕中具有高柔性的天然大分子链倾向于形成平坦致密的层,而不是明显的皱纹。然而,这一现象为纹理工程提供了宝贵的启示,因为通过引入刚性结构组件来放大局部应力不均匀性,可以促进纹理结构的发展。
本文亮点
1. 本工作受中国传统食品年糕的启发,通过一锅法制造了一种表面具有不对称Janus粘附和纹理结构的类皮肤生物水凝胶,并被评估为用于传感和人机交互的电子皮肤。
2. e-skin是通过氢键和金属配体配位构建的,具有良好的韧性和拉伸性(抗拉强度为173 kPa,应变为1593%)。e-skin的底面达到了66.7 kPa的粘附强度,上表面在不同的基材上没有粘附,这确保了底部信号的稳定收集,避免了与上侧衣物或外部物体偶然接触的干扰。
3. 皮肤模拟纹理是在干燥过程中产生的,这赋予了水凝胶与生物皮肤相当的视觉真实性;因此,它可用于人形机器人的疤痕覆盖和皮肤封装。
4. e-skin具有出色的生物相容性以及93.5%的高自愈效率,是为多用途实时应用而开发和验证的。
5. 它能够基于EMG和EEG信号准确识别手势,实时控制辅助机器人手臂,突显了其在下一代美学和功能性可穿戴电子产品中的潜力。
图文解析
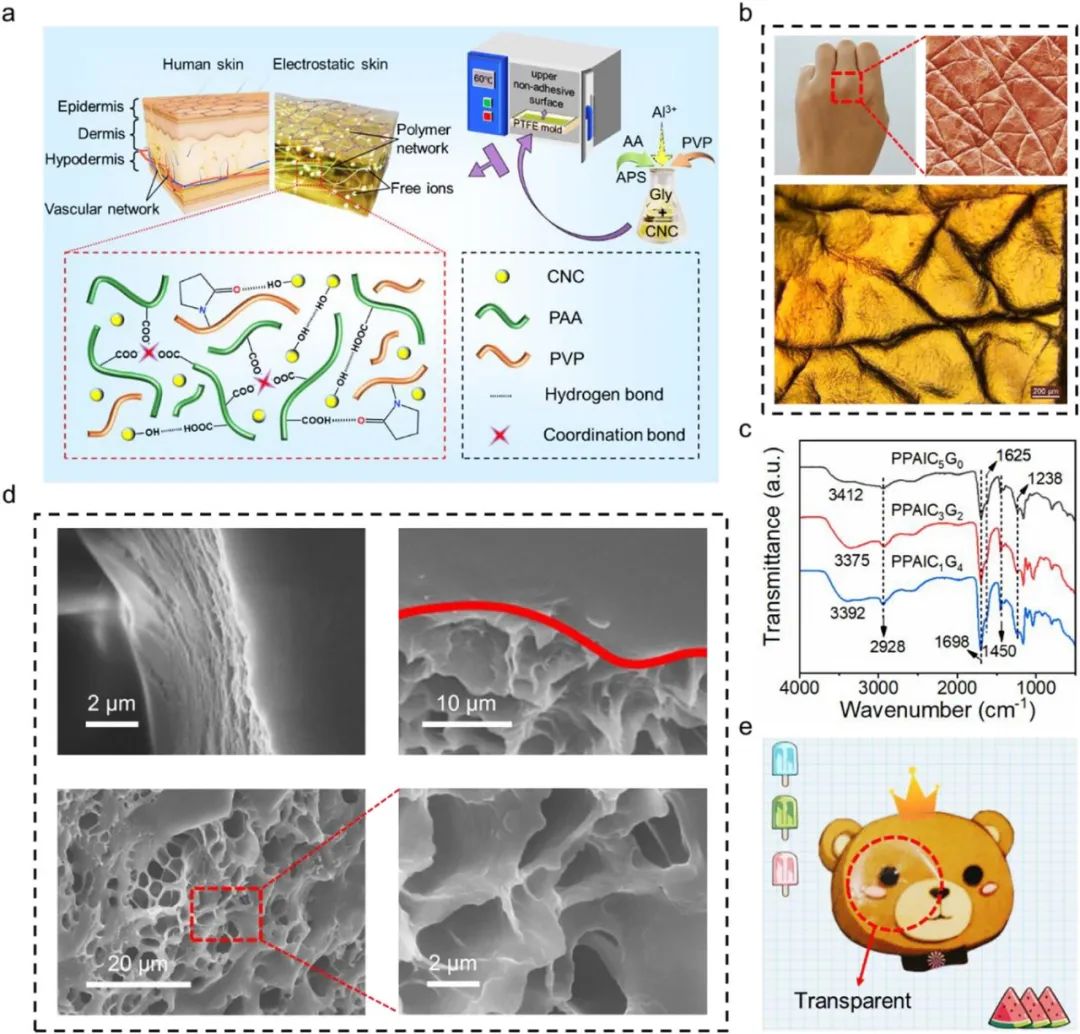
图1. a) PPAlCxGy水凝胶的设计和制造示意图。b)人体皮肤(上)和PPAlCxGy水凝胶(下)的表面显微照片。c)PPAlCxGy水凝胶的FTIR光谱。d)PPAlCxGy水凝胶的整体和放大的横截面形态。e)PPAlCxGy水凝胶薄膜的数码照片,显示其光学透明度。
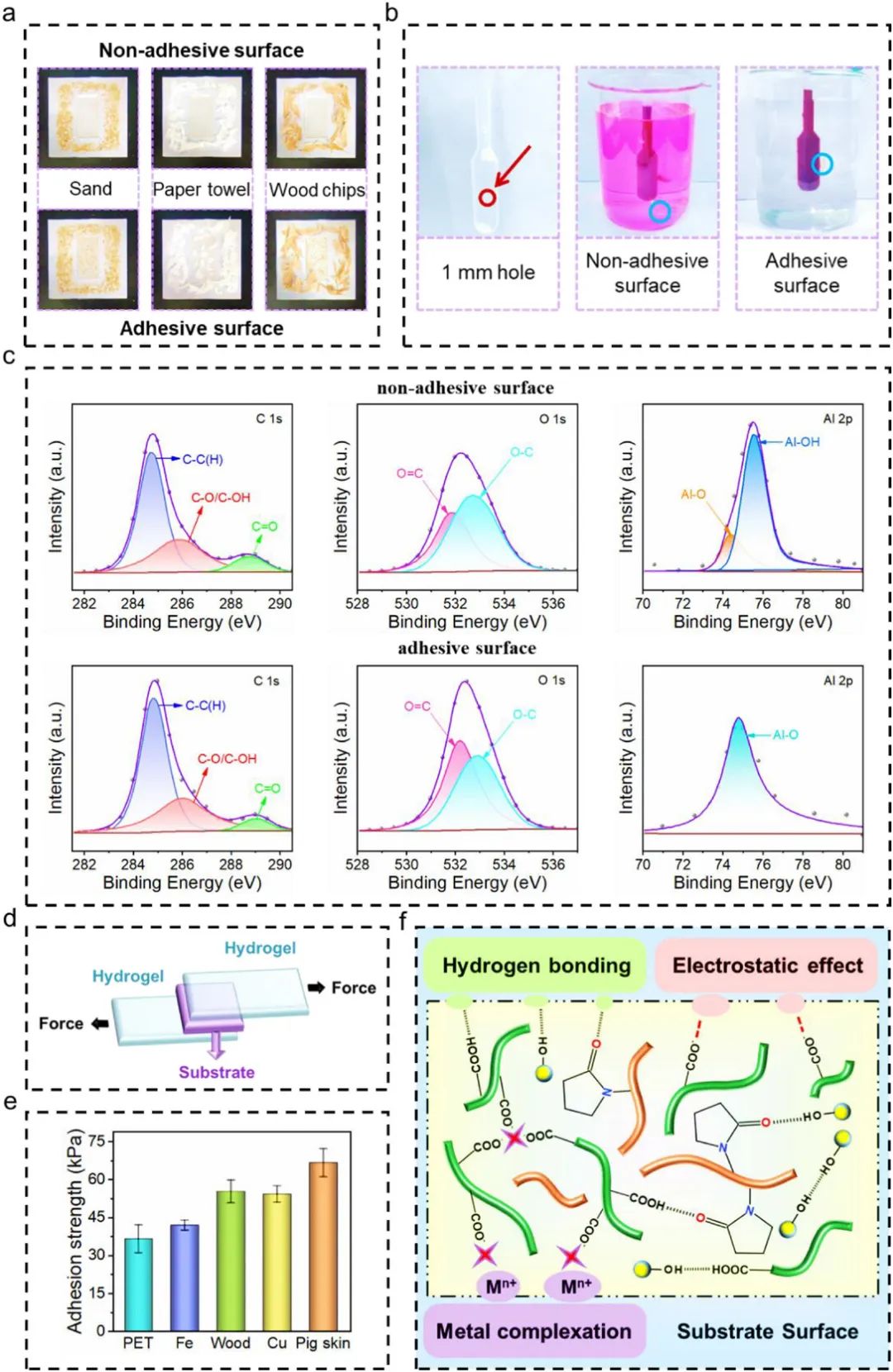
图2. PPAlCxGy水凝胶的粘附性能。a)沙子、纸巾和木屑在不对称粘性水凝胶上的粘附行为示意图。b)不对称粘合剂PPAlCxGy水凝胶对填充有罗丹明b溶液的一次性塑料滴管的不同修复性能。c)PPAlCxGy水凝胶粘合表面和非粘合表面的XPS光谱:c 1s和O 1s以及Al 2p区域。d)附着力测试图示。e)PPAlCxGy水凝胶在不同基材上的粘附强度。f)水凝胶和不同基质之间可能的粘附机制示意图。
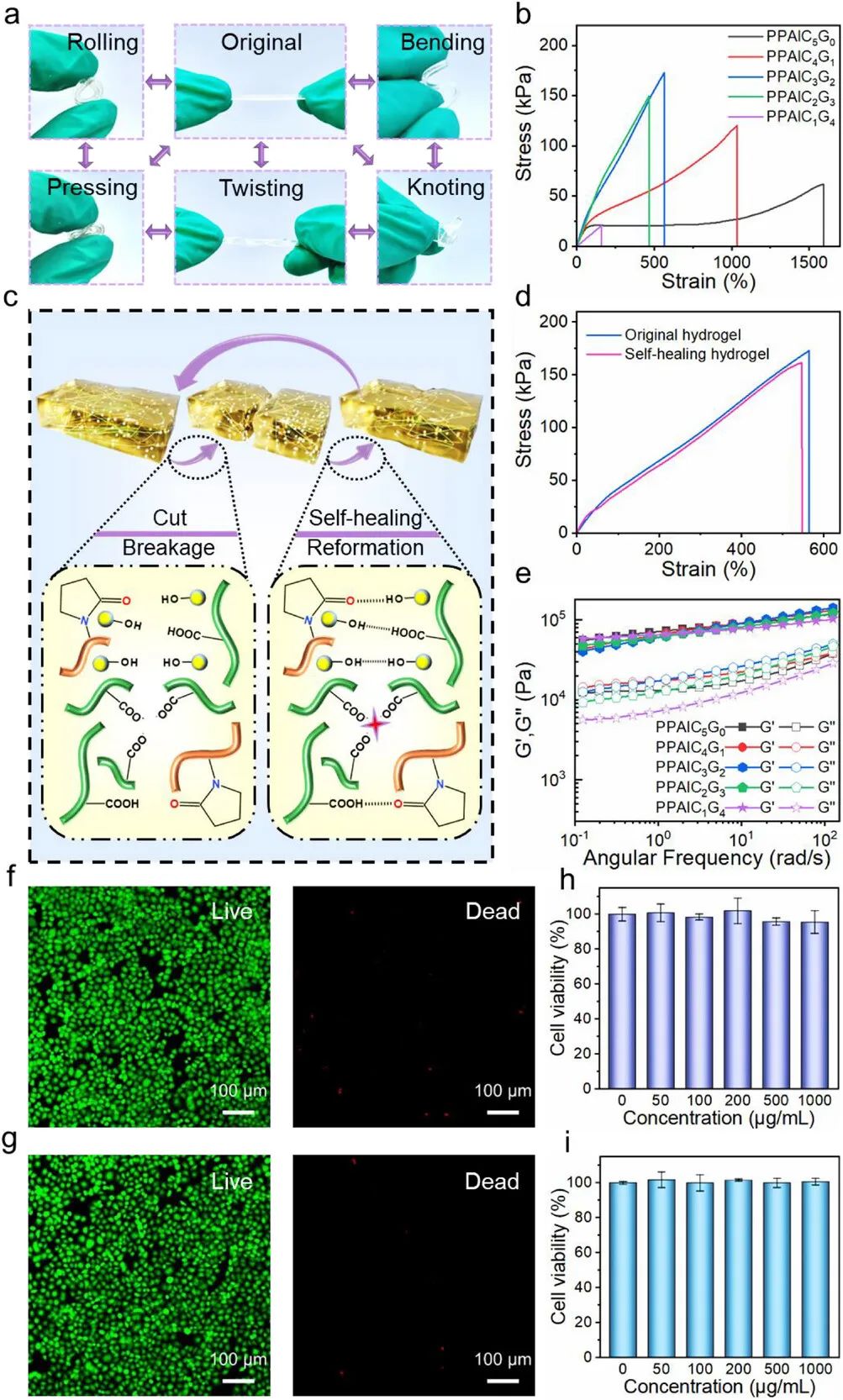
图3. a) PPAlCxGy水凝胶的变形。b)拉伸应力-应变曲线。c)自愈机制示意图。d)原始水凝胶和自愈水凝胶的拉伸应变-应力曲线。e)G'和G“”的角频率依赖性。f)PPAlC3G2和g)PPAlC5G0水凝胶L929细胞的活/死染色形态。L929细胞对h)PPAlC3G2和i)PPAlC5G0水凝胶的细胞存活率。
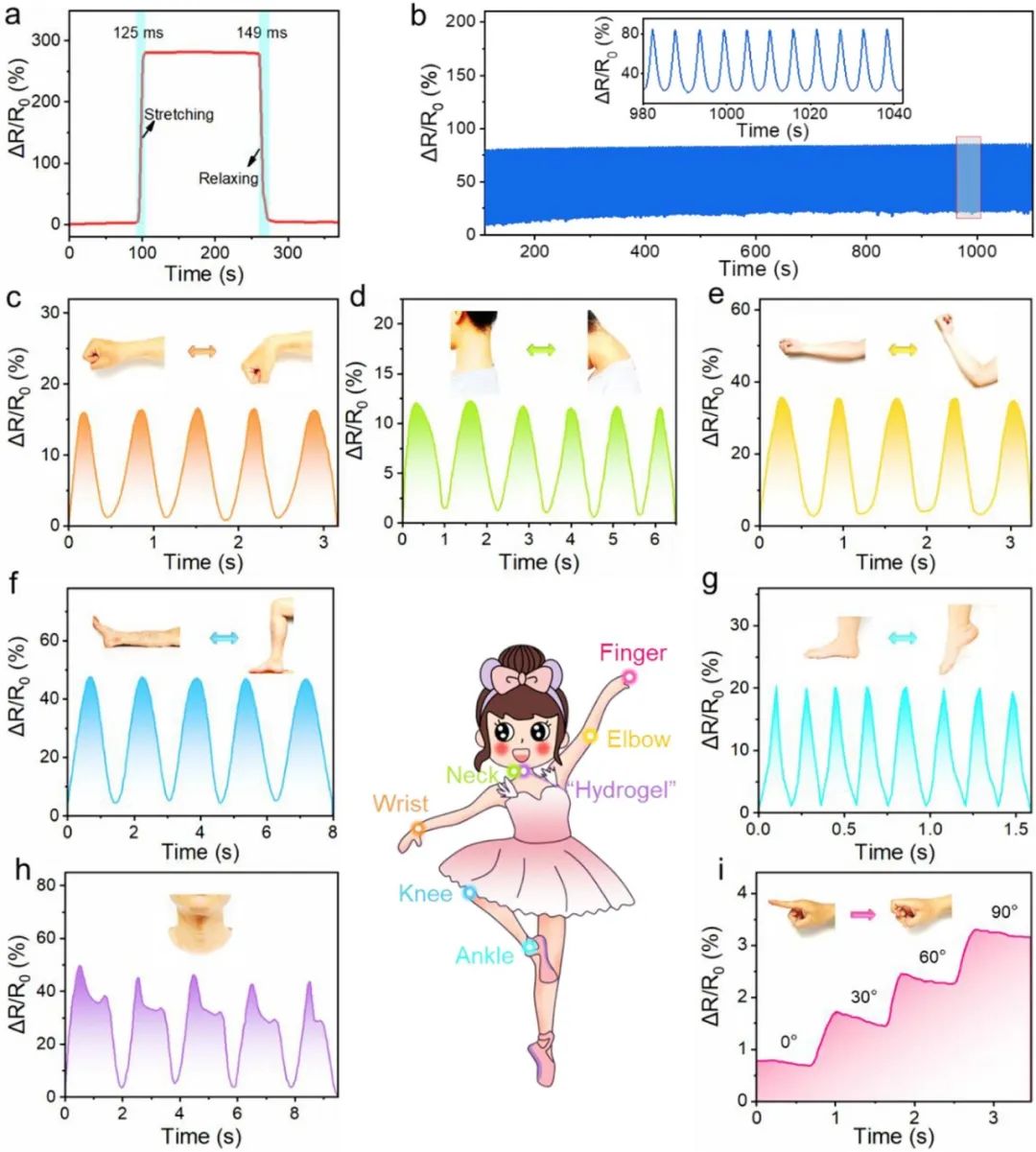
图4. PPAlCxGy水凝胶的机电性能。a)响应和恢复时间。b)超过2000次加载和卸载循环的循环稳定性试验。实时运动监测。c)手腕弯曲,d)颈部弯曲,e)肘部弯曲,f)膝盖弯曲,g)脚踝弯曲,h)说话,i)手指弯曲一定角度。
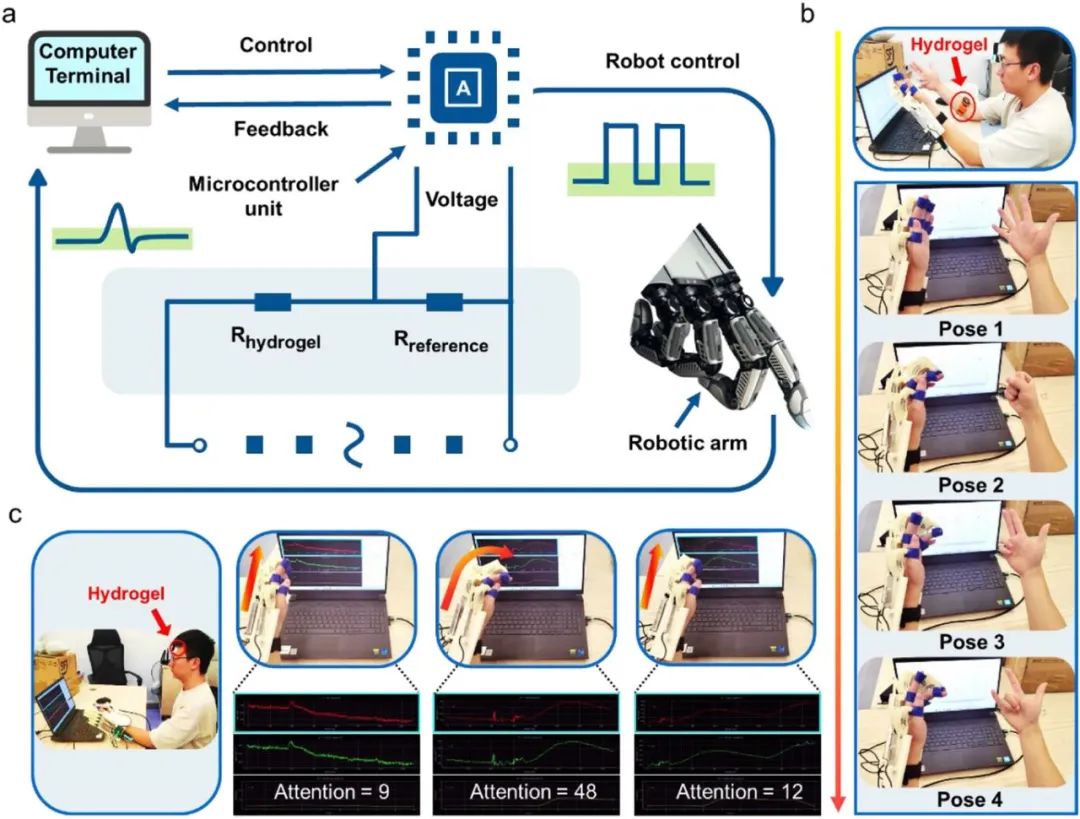
图5. a) 辅助机械臂的控制图。b)从不同手势识别EMG信号。c)基于EEG信号的反馈控制系统,用于控制辅助机器人手臂。
来源:柔性传感及器件



2025-08-24 12:25
2025-08-24 12:09
2025-08-24 11:44
2025-08-24 11:40
2025-08-24 11:07
2025-08-24 11:04
2025-08-24 11:03
2025-08-24 10:33